



多目3D结构光
Snap3D-40
产品特点
1、底层创新
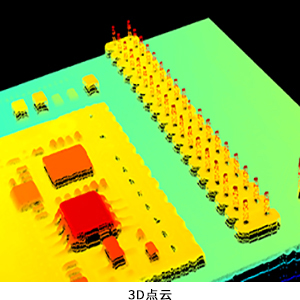
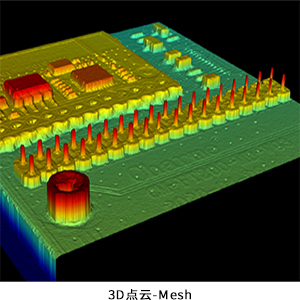
从物理底层原理和算法上进行重构, 光机和算法均区别于国内工业3D传感器,5相机同时采图,短时间内获得千万级高精度3D点云和多组多方向的2D信息。
2、2D&3D同时成像
自研双通道双远心成像系统, 在确保投影光机高精度投影的同时兼顾2D成像, 做到了真正的2D和3D同时采图和计算。
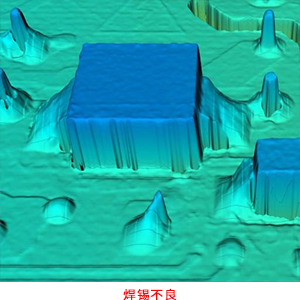
3、高动态抗反射3D算法
结合硬件, 动态调整照明参数,并进行动态图像时域融合, 实现高亮和至暗器件的无死角3D成像。
产品参数
型号
Snap3D-40
拍摄相机
2500万像素CMOS×1个
500万像素CMOS×4个
主相机2D图
分辨率
5120×5120
数据间隔
7.8 um
侧相机2D图
分辨率
2448×2048
数据间隔
22 um
3D点云分辨率
2560×2560(1280×1280)
视野范围
40mm×40mm
量程范围(Z方向)
±15mm
工作距离
80mm
绝对测量精度*1
±1 um
重复测量精度*2
≤0.08 um
采图速度
0.41s/FOV、0.19s/FOV
光源
45°白光&同轴蓝光
成像方向
5方向
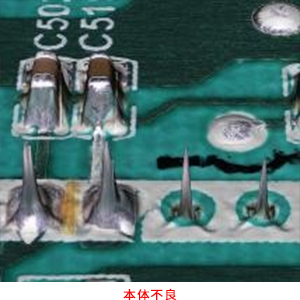
该传感器为3D AOI设备的核心部件,具有速度快、精度高、景深范围大的明显优势。

产品Pin针相对于基准面较高,能够发挥大量程和针尖解析优势,获得Pin针的点云数据并进一步测量针尖到底板的高度结果。
